

3D4LIFE Journals Results
Clustered voxel real-time global illumination
Computers & Graphics, Vol. 103, pp 75--89, 2022.
DOI: http://dx.doi.org/10.1016/j.cag.2022.01.005
DOI: http://dx.doi.org/10.1016/j.cag.2022.01.005
BibTeX

Feature-based clustered geometry for interpolated Ray-casting
Computers & Graphics, Vol. 102, pp 175--186, 2021.
DOI: http://dx.doi.org/10.1016/j.cag.2021.08.019
DOI: http://dx.doi.org/10.1016/j.cag.2021.08.019
BibTeX
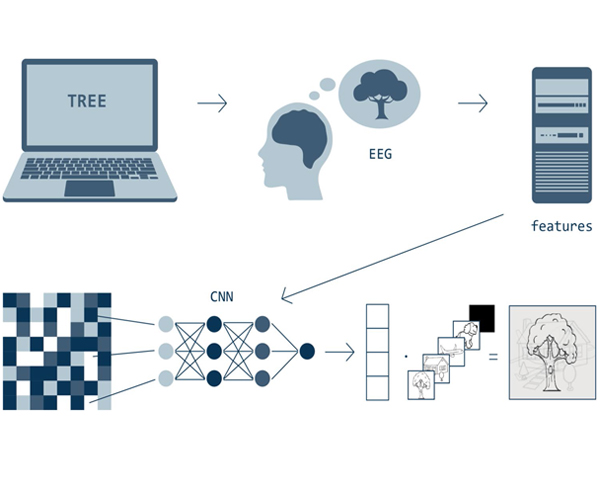
Classify four imagined objects with EEG signals
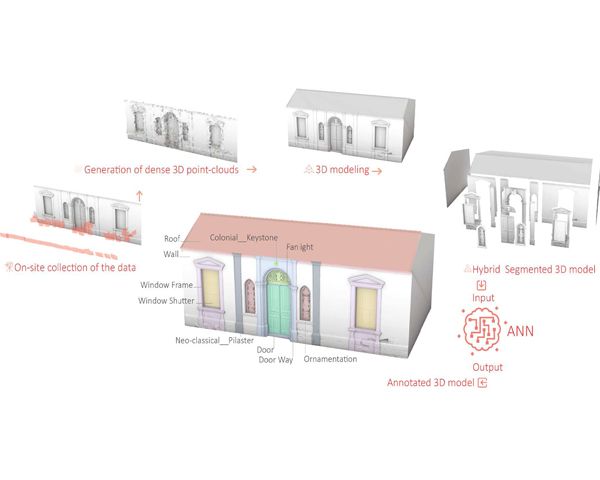
A 3D digitisation workflow for architecture-specific annotation of built heritage
Journal of Archaeological Science: Reports, Vol. 37, pp 102787, 2021.
DOI: http://dx.doi.org/10.1016/j.jasrep.2020.102787
DOI: http://dx.doi.org/10.1016/j.jasrep.2020.102787
BibTeX
Computers & Graphics, Vol. 99, pp 83--99, 2021.
DOI: http://dx.doi.org/10.1016/j.cag.2021.06.014
DOI: http://dx.doi.org/10.1016/j.cag.2021.06.014
BibTeX
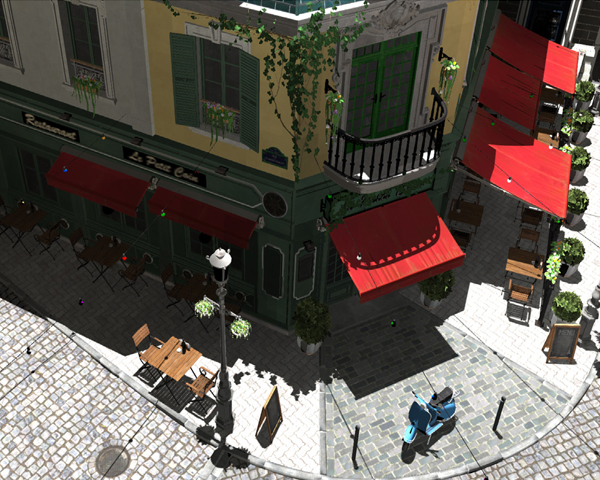
Authoring meaningful crowds to populate a virtual city can be a cumbersome, time-consuming and an error-prone task. In this work, we present a new framework for authoring populated environments in an easier and faster way, by relying on the use of procedural techniques. Our framework consists of the procedural generation of semantically-augmented virtual cities to drive the procedural generation and simulation of crowds. The main novelty lies in the generation of agendas for each individual inhabitant (alone or as part of a family) by using a rule-based grammar that combines city semantics with the autonomous persons’ characteristics. A new population or city can be authored by editing rule files with the flexibility of reusing, combining or extending the rules of previous populations. The results show how logical and consistent sequences of whereabouts can be easily generated for a crowd providing a good starting point to bring virtual cities to life.
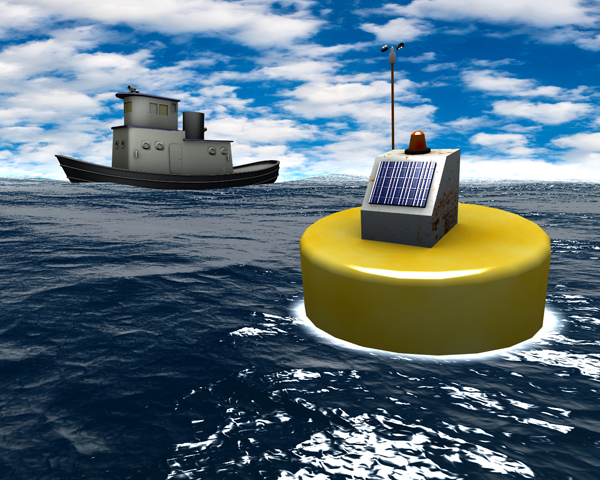
Realistic Buoyancy Model for Real-Time Applications
Computer Graphics Forum, Vol. 39, Num. 6, pp 217--231, 2020.
DOI: http://dx.doi.org/10.1111/cgf.14013
DOI: http://dx.doi.org/10.1111/cgf.14013
BibTeX
Following Archimedes Principle, any object immersed in a fluid is subject to an upward buoyancy force equal to the weight of the fluid displaced by the object. This simple description is the origin of a set of effects that are ubiquitous in nature, and are becoming commonplace in games, simulators and interactive animations. Although there are solutions to the fluid‐to‐solid coupling problem in some particular cases, to the best of our knowledge, comprehensive and accurate computational buoyancy models adequate in general contexts are still lacking. We propose a real‐time Graphics Processing Unit (GPU) based algorithm for realistic computation of the fluid‐to‐solid coupling problem, which is adequate for a wide generality of cases (solid or hollow objects, with permeable or leak‐proof surfaces, and with variable masses). The method incorporates the behaviour of the fluid into which the object is immersed, and decouples the computation of the physical parameters involved in the buoyancy force of the empty object from the mass of contained liquid. The dynamics of this mass of liquid are also computed, in a way such that the relation between the centre of mass of the object and the buoyancy force may vary, leading to complex, realistic beha viours such as the ones arising for instance with a sinking boat.
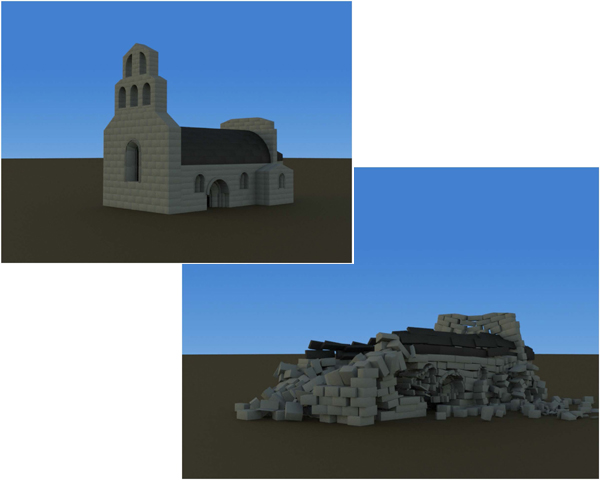
Earthquake Simulation on Ancient Masonry Buildings
Journal on Computing and Cultural Heritage, Vol. 13, Num. 2, pp 11, 2020.
DOI: http://dx.doi.org/10.1145/3372421
DOI: http://dx.doi.org/10.1145/3372421
BibTeX
Research on seismic simulations has focused mainly on methodologies specially tailored to civil engineering. However, we have detected a lack in the area of interactive cultural heritage applications, where speed and plausibility are the main requirements to satisfy. We designed a tool that allows setting up and recreating earthquakes in a simple way. We coupled our earthquake simulator with a structural simulator of physics, specifically tailored to masonry buildings, achieving a high degree of accuracy in the simulations. To validate our model, we performed a series of tests over a set of ancient masonry structures such as walls and churches. We show the feasibility of including earthquake simulations and structural vulnerability, a building property that limits the damage of this under seismic movements, into historical studies for helping professionals understand those events of the past where an earthquake took place.
The Visual Computer, Num. 37, pp 2053--2068, 2020.
DOI: http://dx.doi.org/10.1007/s00371-020-01963-w
DOI: http://dx.doi.org/10.1007/s00371-020-01963-w
BibTeX
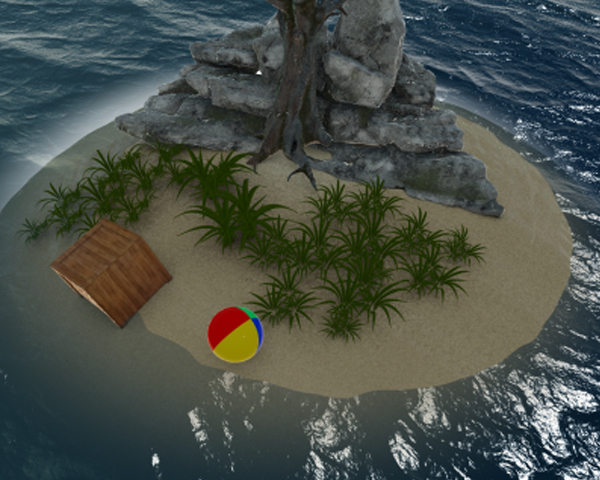
The visual appearance of materials depends on their intrinsic light transfer properties, the illumination and camera conditions, and other environmental factors. This is in particular the case of porous, rough, or absorbent materials, where the presence of liquid on the surface alters significantly their BRDF, which in turn results in considerable changes in their visual appearance. For this reason, rendering materials change their appearance when wet continues to be a relevant topic in computer graphics. This is especially true when real-time photo-realistic rendering is required in scenes involving this kind of materials in interaction with water or other liquids. In this paper, we introduce a physically inspired technique to model and render appearance changes of absorbent materials when their surface is wet. First, we develop a new method to solve the interaction between the liquid and the object surface using its own underlying texture coordinates. Then, we propose an algorithm to model the diffusion phenomenon that occurs in the interface between a solid porous object and a liquid. Finally, we extend a model that explains the change of appearance of materials under wet conditions, and we implement it achieving real-time performance. The complete model is developed using GPU acceleration.
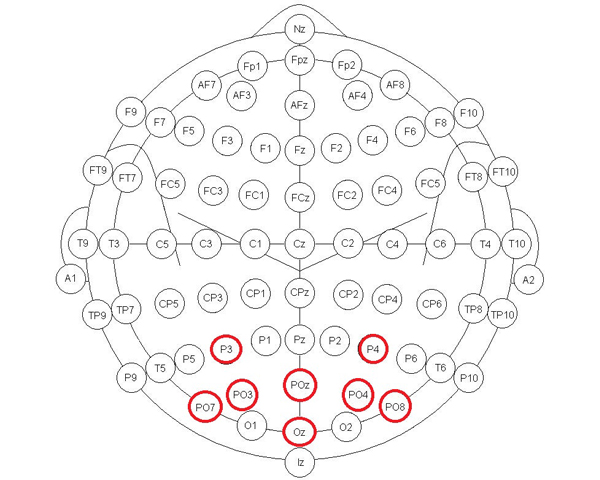
Convolutional Neural Networks and Genetic Algorithm for Visual Imagery Classification
Physical and Engineering Sciences in Medicine, Vol. 43, Num. 3, pp 973--983, 2020.
DOI: http://dx.doi.org/10.1007/s13246-020-00894-z
DOI: http://dx.doi.org/10.1007/s13246-020-00894-z
BibTeX
Brain-Computer Interface (BCI) systems establish a channel for direct communication between the brain and the outside world without having to use the peripheral nervous system. While most BCI systems use evoked potentials and motor imagery, in the present work we present a technique that employs visual imagery. Our technique uses neural networks to classify the signals produced in visual imagery. To this end, we have used densely connected neural and convolutional networks, together with a genetic algorithm to find the best parameters for these networks. The results we obtained are a 60% success rate in the classification of four imagined objects (a tree, a dog, an airplane and a house) plus a state of relaxation, thus outperforming the state of the art in visual imagery classification.

Computer Graphics Forum, Vol. 39, Num. 1, pp 650-671, 2020.
DOI: http://dx.doi.org/10.1111/cgf.13897
DOI: http://dx.doi.org/10.1111/cgf.13897
BibTeX
Ancient cities and castles are ubiquitous cultural heritage structures all over Europe, and countless digital creations (e.g. movies and games) use them for storytelling. However, they got little or no attention in the computer graphics literature. This paper aims to close the gap between historical and geometrical modelling, by presenting a framework that allows the forward and inverse design of ancient city (e.g. castles and walled cities) evolution along history. The main component is an interactive loop that cycles over a number of years simulating the evolution of a city. The user can define events, such as battles, city growth, wall creations or expansions, or any other historical event. Firstly, cities (or castles) and their walls are created, and, later on, expanded to encompass civil or strategic facilities to protect. In our framework, battle simulations are used to detect weaknesses and strengthen them, evolving to accommodate to developments in offensive weaponry. We conducted both forward and inverse design tests on three different scenarios: the city of Carcassone (France), the city of Gerunda (Spain) and the Ciutadella in ancient Barcelona. All the results have been validated by historians who helped fine‐tune the different parameters involved in the simulations.
Code available at: https://github.com/neich/BattleField
Computers & Graphics, Vol. 86, pp 15--26, 2020.
DOI: http://dx.doi.org/10.1016/j.cag.2019.11.004
DOI: http://dx.doi.org/10.1016/j.cag.2019.11.004
BibTeX
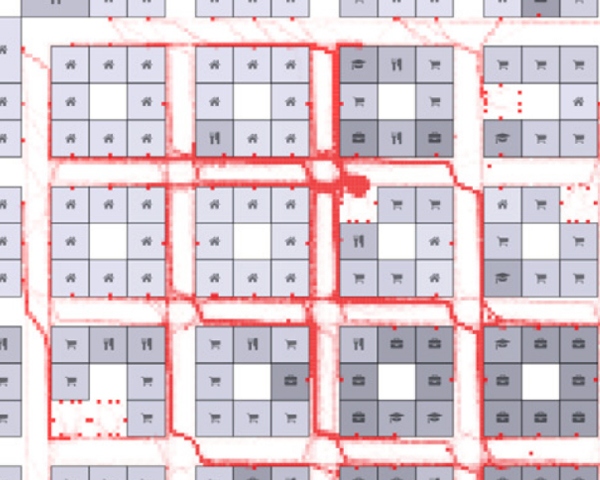
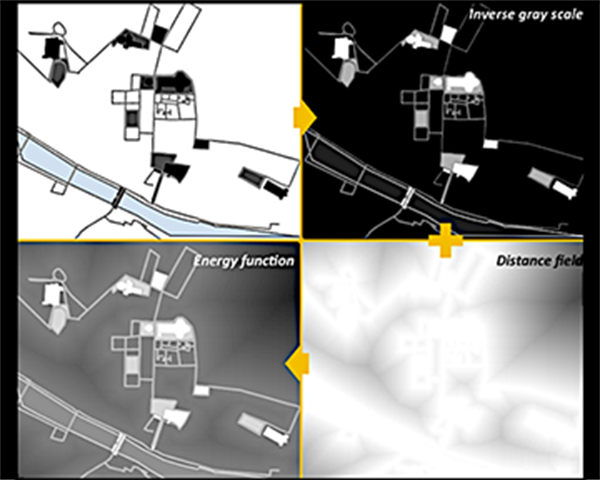
One important use of realistic city environments is in the video game industry. When a company works on a game whose action occurs in a real-world environment, a team of designers usually creates a simplified model of the real city. In particular, the resulting city is desired to be smaller in extent to increase playability and fun, avoiding long walks and boring neighborhoods. This is manual work, usually started from scratch, where the first step is to take the original city map as input, and from it create the street network of the final city, removing insignificant streets and bringing important places closer together in the process. This first draft of the city street network is like a kind of skeleton with the most important places connected, from which the artist can (and should) start working until the desired result is obtained. In this paper, we propose a solution to automatically generate such a first simplified street network draft. This is achieved by using the well-established seam-carving technique applied to a skeleton of the city layout, built with the important landmarks and streets of the city. The output that our process provides is a street network that reduces the city area as much as the designer wants, preserving land- marks and key streets, while keeping the relative positions between them. For this, we run a shrinking process that reduces the area in an irregular way, prioritizing the removal of areas of less importance. This way, we achieve a smaller city but retain the essence of the real-world one. To further help the designer, we also present an automatic filling algorithm that adds unimportant streets to the shrunken skeleton.

Computer Graphics Forum, Vol. 38, Num. 1, pp 274-285, 2019.
DOI: http://dx.doi.org/10.1111/cgf.13530
DOI: http://dx.doi.org/10.1111/cgf.13530
BibTeX
Abstract Modelling flow phenomena and their related weathering effects is often cumbersome due their dependence on the environment, materials and geometric properties of objects in the scene. Example-based modelling provides many advantages for reproducing real textures, but little effort has been devoted to reproducing and transferring complex phenomena. In order to produce realistic flow effects, it is possible to take advantage of the widespread availability of flow images on the Internet, which can be used to gather key information about the flow. In this paper, we present a technique that allows the transfer of flow phenomena between photographs, adapting the flow to the target image and giving the user flexibility and control through specifically tailored parameters. This is done through two types of control curves: a fitted theoretical curve to control the mass of deposited material, and an extended colour map for properly adapting to the target appearance. In addition, our method filters and warps the input flow in order to account for the geometric details of the target surface. This leads to a fast and intuitive approach to easily transfer phenomena between images, providing a set of simple and intuitive parameters to control the process.
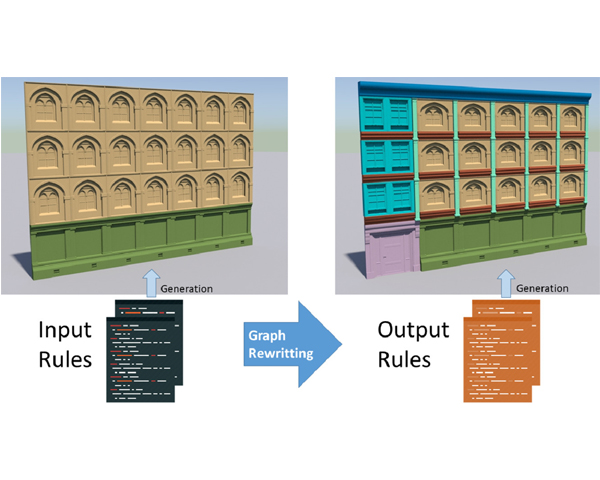
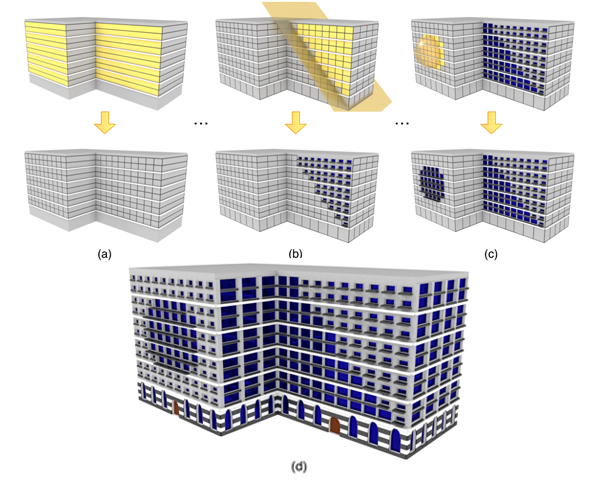
Ruleset-rewriting for procedural modeling of buildings
Computers & Graphics, Vol. 84, Num. 11, pp 93 -- 102, 2019.
DOI: http://dx.doi.org/10.1016/j.cag.2019.08.003
DOI: http://dx.doi.org/10.1016/j.cag.2019.08.003
BibTeX
Procedural modeling techniques have emerged as a fundamental tool for automatic design and reconstruction of buildings and urban landscapes. In recent years, we have witnessed an impressive increase in the expressive capabilities of such techniques, being its main strength the possibility of generating large urban scenes with a small ruleset. In this paper, we propose what we consider the next stage in this process, where generic graph-rewriting techniques are used to transform input rulesets into new ones, thus allowing the automatic reuse, transformation and generation of rulesets. We showcase our system with an application to a high-level procedural language (based on the well-known CGA grammars) for facades. We demonstrate the practicality of this new approach by transforming the style of the input facade previously created to different styles. User studies confirm this result.
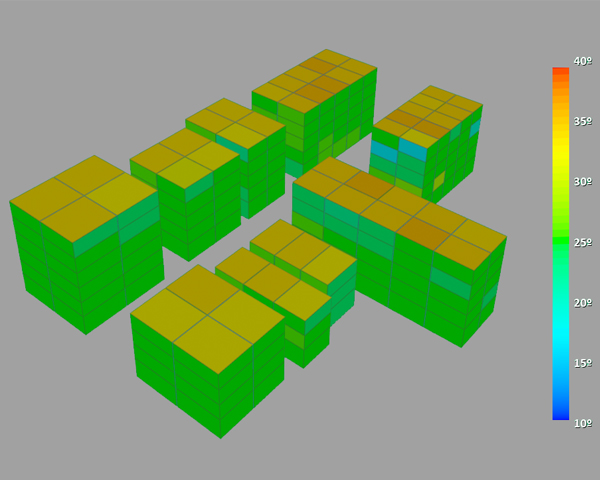
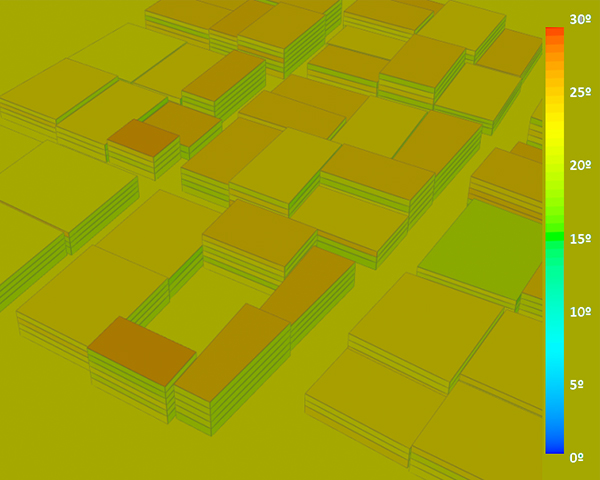
A procedural technique for thermal simulation and visualization in urban environments
Analysing the thermal behaviour of buildings is an important goal for any and all of the tasks involving energy flow simulation in urban environments. However, the number of variables to be considered, along with the difficulty of implementing some of them, make it difficult to address the problem on an urban scale. In this paper we propose a procedural approach that, from a 3D urban model and a set of parameters, simulates the thermal exchanges that take place inside and outside buildings in an urban environment. We also provide a technique to efficiently visualise thermal variations over time of both the interior and exterior of buildings in an urban environment. We believe this technique will be helpful for performing a rapid analysis when building parameters, such as materials, dimensions, shape or number of floors, are being changed.
Graphical Models, Vol. 106, pp 101049, 2019.
DOI: http://dx.doi.org/10.1016/j.gmod.2019.101049
DOI: http://dx.doi.org/10.1016/j.gmod.2019.101049
BibTeX
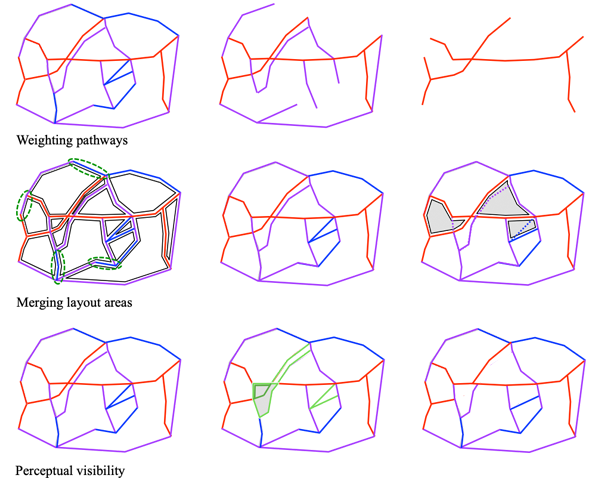
Generalization of 2D city layouts is a relevant operation common to Computer Graphics and GIS, whose goal is to generate simplified representations of street networks. However, most of the contributions in this area belong to the GIS literature, which we intend to bring closer to the CG community. In this paper we propose a three- fold characterization of the algorithms dedicated to generic generalization and we also analyze the techniques proposed for the generation of personalized route maps in CG. We examine their data structures, simplification criteria and theoretical basis. To enable a comparative comprehension, we propose unified terminology and we refer the graphs used in the GIS literature to their name used in graph theory. From our analysis of the generalization techniques, we propose four research lines for further investigation to design new generalization algorithms, either from original ideas or by combining/extending some of the reviewed techniques.
Computers & Graphics, Vol. 72, pp 106-121, 2018.
DOI: http://dx.doi.org/10.1016/j.cag.2018.02.003
DOI: http://dx.doi.org/10.1016/j.cag.2018.02.003
BibTeX
Procedural modeling techniques reduce the effort of creating large virtual cities. However, current methodologies do not allow direct user control over the generated models. Associated with this problem, we face the additional problem related to intrinsic ambiguity existing in user selections. In this paper, we propose to address this problem by using a genetic algorithm to generalize user-provided point-and-click selections of building elements. From a few user-selected elements, the system infers new sets of elements that potentially correspond to the users intention, including the ones manually selected. These sets are obtained by queries over the shape trees generated by the procedural rules, thus exploiting shape semantics, hierarchy and geometric properties. Our system also provides a complete selection-action paradigm that allows users to edit procedurally generated buildings without necessarily explicitly writing queries. The pairs of user selections and procedural operations (the actions) are stored in a tree-like structure, which is easily evaluated. Results show that the selection inference is capable of generating sets of shapes that closely match the user intention and queries are able to perform complex selections that would be difficult to achieve in other systems. User studies confirm this result.

Computers & Graphics, Vol. 77, pp 1 - 15, 2018.
DOI: http://dx.doi.org/10.1016/j.cag.2018.09.010
DOI: http://dx.doi.org/10.1016/j.cag.2018.09.010
BibTeX
This paper presents a global optimization algorithm specifically tailored for inverse reflector design problems. In such problems, the goal is to obtain a reflector shape that produces a light distribution as close as possible to a user-provided one. The optimization is an iterative process where each step evaluates the difference between the current reflector illumination and the desired one. We propose a tree-based stochastic method that drives the optimization process, using some heuristic rules, to reach a minimum below a user-provided threshold that satisfies the requirements. When we are close to the solution, we resort to the Hooke and Jeeves method, to reach the minimum faster. Extending our previous work Mas et al. (2010), we show that our method reaches a solution in fewer steps than most other classic optimization methods, and also avoids many local minima. The method has been tested on a real case study based on European road lighting safety regulations.
3D4LIFE Conferences Results

18th Eurographics Workshop on Graphics and Cultural Heritage, pp 79, 2020.
DOI: http://dx.doi.org/10.2312/gch.20201295
DOI: http://dx.doi.org/10.2312/gch.20201295
BibTeX
The European project Enhancement of Heritage Experiences: The Middle Ages. Digital Layered Models of Architecture and Mural Paintings over Time (EHEM), approved in the call for JPICH Conservation, Protection and Use (0127) in the year 2020, aims to obtain virtual reconstructions of medieval artistic heritage - architecture with mural paintings - that are as close as possible to the original at different times, incorporating historical-artistic knowledge and the diachronic perspective of heritage, as an instrument for researchers, restorers and heritage curators and to improve the visitor's perceptions and experiences.
A Level-of-Detail Technique for Urban Physics Calculations in Large Urban Environments
Spanish Computer Graphics Conference (CEIG), pp 09-17, 2019.
DOI: http://dx.doi.org/10.2312/ceig.20191198
DOI: http://dx.doi.org/10.2312/ceig.20191198
BibTeX
In many applications, such as urban physics simulations or the study of the solar impact effects at different scales, complex 3D city models are required to evaluate physical values. In this paper we present a new technique which, through the use of an electrical analogy and the calculation of sky view factors and form factors, allows to simulate and study the thermal behaviour of an urban environment, taking into account the solar and sky radiation, the air and sky temperatures, and even the thermal interaction between nearby buildings. We also show that it is possible, from a 3D recreation of a large urban environment, to simulate the heat exchanges that take place between the buildings of a city and its immediate surroundings. In the same way, taking into account the terrestrial zone, the altitude and the type of climate with which the simulations are carried out, it is possible to compare the thermal behaviour of a large urban environment according to the chosen conditions.
LeoMCAD: A Lego-based Mechanical CAD system
Spanish Computer Graphics Conference (CEIG), 2018.
DOI: http://dx.doi.org/10.2312/ceig.20181163
PDF
DOI: http://dx.doi.org/10.2312/ceig.20181163
BibTeX
Mechanical Design (MCAD) tools are used for creating 3D digital prototypes used in the design, visualization, and simulation of products. In this paper we present LeoMCAD, a Lego-based mechanical system designed to be used as an education tool both for kids and Lego hobbyists; but which features a novel solver that naturally and seamlessly computes the interaction between the pieces that build-up a given model, solving an otherwise complex forward kinematic system of equations in a much simpler way. The results show how our system is able to cope with situations that would produce dead-lock situations in more advanced commercial systems.
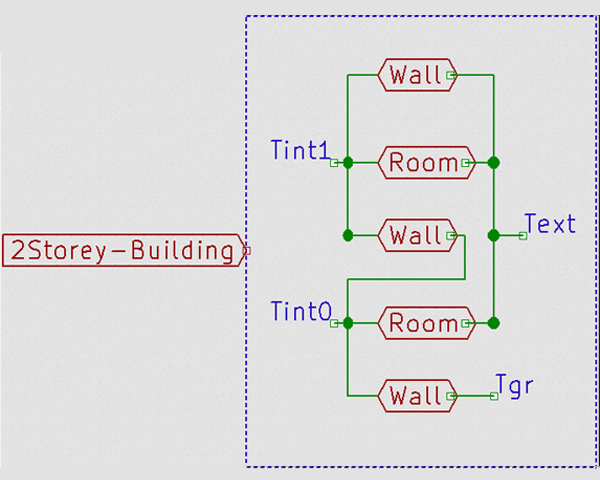
A procedural approach for thermal visualization on buildings
Spanish Computer Graphics Conference (CEIG), pp 109--117, 2018.
DOI: http://dx.doi.org/10.2312/ceig.20181164
PDF
DOI: http://dx.doi.org/10.2312/ceig.20181164
BibTeX
Thermal behaviour analysis on buildings is an important goal for all tasks involving energy flow simulation in urban environments. One of the most widely used simplified thermal models is based on an electrical analogy, where nodes are set to simulate and solve a circuit network. In this paper we propose a procedural approach for automatically locate the nodes of the circuit, according to the building structure. We provide a conceptual technique to efficiently visualize thermal variations over time in buildings. We show that we can simulate and visually represent the variations of the interior temperatures of a building over a period of time. We believe that the technique could be helpful for rapid analysis for changing building parameters, such as materials, dimensions or number of floors.
3D4life PhD Thesis Results